 塑料機械網
塑料機械網

詳細介紹
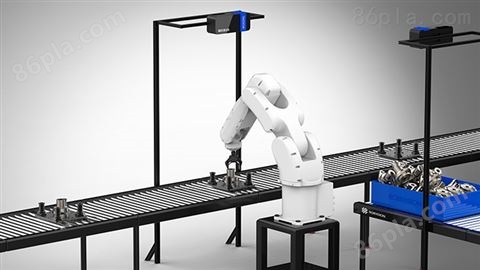
3D視覺零件揀選,由3D成像單元和運動路徑規劃單元組成,實現了機器人的“眼睛”與“大腦”功能。
機器視覺技術常常用于定位與導引,提供機械手或其它執行機構以準確的二維或三維坐標,進行路徑規劃,引導機械手完成規定的作業和任務。定位與導引系統往往和其它系統一并構成較復雜的技術系統,實現特定的功能,滿足需求。

3D視覺零件揀選技術原理:通過高速、精確的3D結構光成像系統,對物體表面輪廓進行掃描,形成點云數據;并對點云數據進行智能分析處理,加以AI算法、機器人路徑自動規劃、自動防碰撞等智能化技術;計算出當前工件實時空間坐標,并引導機器人完成自動抓取任務。
可以完成以下任務:
1、多品種工件的機器人3D定位抓取上料
2、料框堆疊物體3D識別定位
3、復雜多面工件的柔性化3D定位抓取
4、大型物體3D定位抓取
5、工件的無序來料3D定位
6、多工序間機器人協作3D定位抓取
7、輸送帶上物體的快速3D定位抓取
8、噴涂機器人來料3D識別定位
9、大型設備的機器人裝配3D定位
產品參數:
|
| WuKong-0230B | WuKong-0230C | WuKong-0300B |
| 描述 | 為零件分揀設計,適用于各種金屬、黑色零件。 | RGBD同時成像,大視野,適用于快遞、零食、藥品等商品分揀 | 可精確掃描,適用于掃描電子PCB板等小物體。 |
| 像素 | 2.3M | 2.3M | 3M |
| 視野(mm)★ | 375*235~2000*1250 | 375*235~2000*1250 | 389*243*80 |
| 掃描時間(s)★ | 快0.2 | ||
| 工作距離(s)★ | 0.45~2.4 | 0.45~2.4 | 0.7 |
| Z軸精度★ | 0.4mm@1m | 0.6mm@1m | 0.1mm@0.7m |
| 數據接口 | RJ45以太網(Gige) | ||
| 供電 | DC12V 6A | ||
| 體積 | - | - | - |
★號部分表示根據實際應用在此范圍內可定制;
 塑料機械網
塑料機械網